Dijkstra's Algorithm
What is a Weighted Graph?
A weighted graph is a graph where each edge has a weight or cost associated with it. This weight can represent distances, time, or any cost metric depending on the problem domain.
Dijkstra’s Algorithm
Breadth-First Search (BFS) finds the path with the fewest segments, but it does not consider weights that’s where Dijkstra Algo is used.
Steps of Dijkstra’s Algorithm:
- Find the cheapest node (i.e., the node with the lowest cost from the starting node).
- Update the cost of its neighbors if a cheaper path is found.
- Mark the node as processed and repeat until all nodes have been processed.
- Calculate the final shortest path by backtracking the parent nodes.
Example 1
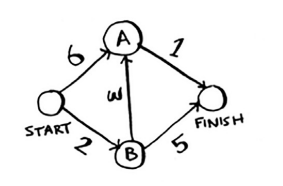
| Node | Cost | Parent |
|---|---|---|
| Start | 0 | - |
| A | 6 | Start |
| B | 2 | Start |
| Fin | Inf. | - |
Step 1: B is the cheapest node from start
Step 2: Update cost of B’s neighbours
- A(cost = 2+3=5) and since 5<6, update A’s cost and change parent to B.
- Fin. (cost=2+5=7) and since 7<Inf., update Fin. cost and change parent to B.
| Node | Cost | Parent |
|---|---|---|
| Start | 0 | - |
| A | 5 | B |
| B | 2 | Start |
| Fin | 7 | B |
Step 1(Second Time): Cheapest node is A
Step 2(Second Time): Update cost of A’s neighbours
- Fin. (cost=5+1=6) and since 6<7, update Fin’s cost and change parent to A
| Node | Cost | Parent |
|---|---|---|
| Start | 0 | - |
| A | 5 | B |
| B | 2 | Start |
| Fin | 6 | A |
Since FINISH has no outgoing edges, Dijkstra’s Algorithm is complete. Finish → Parent is A → Parent is B → Parent is Start.
Final Shortest Path: Start → B → A → Finish
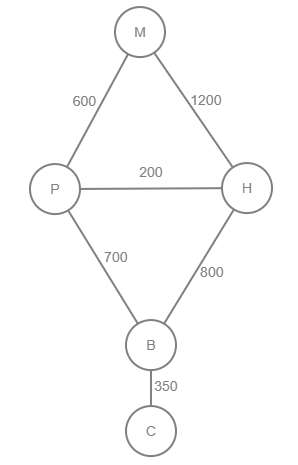
Example 2
| City | Cost | Parent |
|---|---|---|
| Mumbai | 0 | - |
| Pune | 600 | Mumbai |
| Hyderabad | 1200 | Mumbai |
| Bangalore | ∞ | - |
| Chennai | ∞ | - |
Step 1: Pune is cheapest
Step 2: Update neighbours of Pune
- Bangalore (600 + 700 = 1300 km)
- Hyderabad (600 + 200 = 800 km, updated from 1200 km)
| City | Distance from Mumbai | Parent |
|---|---|---|
| Mumbai | 0 | - |
| Pune | 600 | Mumbai |
| Hyderabad | 800 | Pune |
| Bangalore | 1300 | Pune |
| Chennai | ∞ | - |
Step 1(Second Time): Hyderabad is cheapest
Step 2(Second Time): Update neighbours of Hyderabad
- Pune(800 + 200 = 1000 km ), Discarded as 1000km >600Km
- Bangalore (800 + 800 = 1600 km, Discarded as 1600Km>1300km
| City | Distance from Mumbai | Parent |
|---|---|---|
| Mumbai | 0 | - |
| Pune | 600 | Mumbai |
| Hyderabad | 800 | Pune |
| Bangalore | 1300 | Pune |
| Chennai | ∞ | - |
Step 1(ThirdTime): Bangalore is cheapest
Step 2(Third Time): Update neighbours of Bangalore
- Chennai(1300 + 350 = 1650 km )
| City | Distance from Mumbai | Parent |
|---|---|---|
| Mumbai | 0 | - |
| Pune | 600 | Mumbai |
| Hyderabad | 800 | Pune |
| Bangalore | 1300 | Pune |
| Chennai | 1650 | Bangalore |
Since Chennai is last city, no new updates
Final shortest path : Mumbai → Pune → Bangalore → Chennai ( Total dist = 1650km)
Dijkstra’s Implementation
function Dijkstra(graph, start):
costs = {} # Stores shortest known distance to each node
parents = {} # Stores the previous node for shortest path tracking
processed = [] # List to track processed nodes
# Initialize costs and parents
for each node in graph:
costs[node] = infinity # Initially, all nodes are unreachable
parents[node] = None # No known parent yet
costs[start] = zero # Distance to start node is zero
# Process the graph
node = find_lowest_cost_node(costs, processed)
while node is not None:
cost = costs[node] # Get the current node's cost
neighbors = graph[node] # Get all neighbors of this node
for each neighbor in neighbors:
new_cost = cost + neighbors[neighbor] # Calculate new cost
if new_cost < costs[neighbor]: # If new path is shorter, update
costs[neighbor] = new_cost
parents[neighbor] = node
processed.append(node) # Mark the node as processed
node = find_lowest_cost_node(costs, processed) # Get next node
return costs, parents # Shortest paths from start node
Running Time - The algorithm processes each node once and updates neighbors, making its time complexity:
- O(V²) using a simple array
- O((V + E) log V) using a priority queue (Heap)